


After having provided an overview of who test pilots are and what they do in the first parts of this series, I’m going to put a bit of a different slant on things in this issue. We’re going to look at how flight test people attempt to inject the real world on a handling issue that is just too complicated to put in everyday terms. In fact, I’ll summarize the issue as: Measure with a micrometer; mark with a chalk line; cut with a chainsaw.
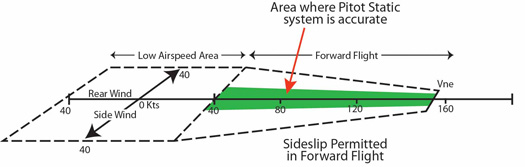
The first of these is in the low airspeed environment — as shown in the diagram below. The pitot system doesn’t work well below 40 knots (despite what some may tell you), and it certainly doesn’t work except when in forward flight.
We have two inseparable but mutually-exclusive problems — we typically don’t have any information in the real world to help pilots here, but it’s the helicopter’s very ability to perform slow and multi-directional flight (with respect to the wind) that is its reason for being. Only helicopters can maintain their position over the earth while enduring winds from any direction — no other machine can do this. So how can we make sure (with some confidence) that a helicopter is capable of handling winds from the side and rear?
Here’s where the test pilots (and flight test engineers) come in — you need to go fly in winds from the side and rear, and measure that the helicopter has enough control authority. Which leads to a natural question: what’s considered “enough” control authority? In roll, pitch and yaw? The U.S. military decided some time ago that 10 percent control power was needed — but without defining what they meant by “control power.” What evolved in that case was that at least 10 percent control travel was needed at the worst condition — simply because defining “control power” proved nearly impossible.
The civil world looked at things a bit differently — perhaps because of the knowledge that there were too many variables in the real world (discussed later), and that the best that could be defined was “sufficient” control to generate a rate to counter any gusts at the worst condition. If you’re confused by that, an explanation will be coming shortly.
Controllability Defined
The defining atmospheric condition for demonstrating controllability was determined to be 7,000 feet density altitude, and 20 mph (17 knots) of wind from any azimuth. Like most airworthiness requirements, this can be traced back to the days of the Bell 47 and Sikorsky R-4. Part 27, paragraph 143 of the United States Federal Aviation Administration (FAA) Federal Aviation Regulations states:
A wind velocity of not less than 17 knots must be established in which the rotorcraft can be operated without loss of control on or near the ground in any maneuver appropriate to the type (such as crosswind takeoffs, sideward flight, and rearward flight), with —
(1) Critical weight;
(2) Critical center of gravity;
(3) Critical rotor r.p.m.; etc.
A quick note here — sideward and rearward flight in this case don’t mean translating sideways or backwards with respect to the ground. In my personal opinion, these are unfortunate choices of words when the terms side- and rear-wind would be more appropriate and more easily understandable.
But how do you test this?
This is where it’s necessary to have a universal and repeatable method of testing that allows an answer to be given, with the full knowledge that the answer may bear little relation to the real world.
The real world for helicopter pilots is full of capricious winds that can suddenly change direction and speed, and are difficult (sometimes impossible) to measure with any accuracy. Just ask yourself — how many times have you had to operate somewhere with no air traffic control or any other way to know the wind direction, let alone the speed?
So, now to the test method. In order to make the test repeatable, you need to start with very little actual wind, and generate the side and rear winds by moving the helicopter. Normally a pace vehicle is used with a fifth wheel to get accurate speeds (many automobile speedometers aren’t that accurate below 40 mph, apparently). The pace vehicle is driven at the required speed, the helicopter flies formation on it at a specific relative wind direction (measured from the nose), and the control positions versus the total control travel (in pitch, roll and yaw) are measured.
Starting at 10 mph, the speed is increased in 5 mph increments until either a speed well above 20 mph is reached and an adequate control margin is reached, or the helicopter runs out of control in one axis (unlikely in any modern helicopter). The test is then repeated at the next increment of relative wind — if you start with the helicopter moving directly to the left, the relative wind is 090 degrees, so the next increment would be either 060 degrees or 120 degrees. This exercise requires a lot of formation flying! In nearly all cases, for North American direction-of-rotation main rotor blades, the worst condition is typically the yaw pedals at 090 degrees of relative wind at about 20 to 25 knots (23 to 29 mph) — after that, the power required to maintain height above the ground decreases dramatically, which affects the tail rotor requirements. The test is then repeated out of ground effect.
A Limitation?

So, we’ve measured the effect of winds on controlling the helicopter with great precision in a very repeatable manner, like good scientists and engineers. But the information is of very little real use to operators who have to contend with no useful way to observe what might be considered by some to be a limitation — so most flight manuals merely state (in the limitations section) that: “the helicopter has been demonstrated to side and rear winds of XX knots.”
This always generates the question: Is this a limitation or something else? And the answer is that no, it’s not a limitation, because it doesn’t say it’s a limitation — it’s merely an indication that the machine met the requirement. Sort of like the aeronautical equivalent of “Your mileage may vary…”
It’s also worth remembering that the test is done in a hover (albeit at maximum weight). If you have excess power above that required to hover at maximum weight at whatever atmospheric conditions, and you then decide to climb vertically, there is no guarantee that you’ll have adequate tail rotor authority to maintain a constant heading. There is no airworthiness certification requirement for this condition, so there is no guarantee that you’ll have that much tail rotor authority — and it would be difficult to make a case that it’s unsafe and needs a new certification requirement.

From a safety perspective, these tests are very high in risk — recovering from a control or engine problem at five feet above ground level when moving sideways across the ground at 30 knots is something that requires immediate and instinctive reactions. Having a compressor stall due to hot exhaust gas re-ingestion at 20 knots of backward speed (as opposed to merely hovering with a 20 knot tailwind) also requires some very good preparation and planning.
During my flight testing career, an interesting request came in for a new helicopter type that required a higher takeoff and landing clearance than that approved in the original certification. Further testing was needed. The helicopter was flown to a high ridgeline site where a fairly constant 20 knot wind was known to exist. The worst case weight and center of gravity condition was established with a large ballast box on the right skid, and only one pilot in the right-hand seat. All that was necessary was to hover at 30 degree intervals of heading and show that there was more than enough pedal (and other) control margin at each azimuth, which was easily and quickly done.
A similar issue that confronts those conducting flight tests is determining the HV (height-velocity) curve. The variables for this are huge, and the intervention time used in the civil world might arguably be too short, but at least there is a uniform standard applied to the testing.
Measuring with a micrometer — we know the windspeed at the helicopter to within two knots or so — but the real world doesn’t give us that degree of accuracy.
Marking with a chalk line — we can publish something that says what the helicopter has been demonstrated to, but it’s not really a limit (because weight, center of gravity, density altitude and so on make it impossible to show a single limit for all these variables).
Cut with a chain saw — the situation faced by a pilot in the real world should be away from the test conditions by a safe margin.
So, in summary, the testing of these conditions to make sure the helicopter has sufficient control authority in the low speed environment is very different than actually operating the helicopter – but over time, it’s proven to be the only way to get a repeatable test.

Best Kept Secrets
Last issue, I questioned why we don’t often hear about this type of flying. Typically, it’s because this type of flying is done by company test pilots on development and prototype aircraft. The company generally doesn’t want to announce their developments too early, and certainly doesn’t want to advertise their failures — and the nature of development is that there will be things that don’t work!
Also, the issues of performance, stability, and control testing are difficult to explain to those who don’t know the theory and practice behind these subjects. I’ve been teaching them at test pilot schools for a long time, and it takes several months to get to a point where students begin to understand the why and wherefore of these tests. So, you can imagine the difficulty of getting the basics across to pilots who, while they are very good at what they do, are not versed in the fundamentals of these arcane subjects.
Finally, other research flying may have some military security issues. If you saw the movies related to the Osama Bin Laden raid, for example, those stealth Black Hawks didn’t just appear out of thin air.
It’s nice to see that they were kept secret for as long as they were.
Shawn Coyle is currently director of academics for Marinvent Corp. and is a Transport Canada DAR flight analyst for helicopters. He has taught flight testing for over 10 years at three major test pilot schools, and certified entry-level simulators in Europe. With over 6,100 flight hours, including time in more than 30 different types of helicopters, he felt he had to write! The author of Cyclic and Collective and The Little Book of Autorotations (available through eagleeyesolutionsllc.com or Amazon.com), he also is involved as an expert witness on helicopters and regularly lectures at seminars and classes related to helicopters and aircraft certification.



