


Retired business owner Bill VanAntwerp, in his beautifully appointed Bell 407, was gracious with the time he provided for the HeliSAS flight test.
There are certain products — aviation and otherwise — that, no matter how good they are, just seem to take a while before they catch on like they should. After getting the opportunity to fly the Genesys Aerosystems HeliSAS in a Bell 407 earlier this summer, I believe this highly capable autopilot is just such a product — and all the pieces seem to be in place to suggest that its time is now.
The origins of HeliSAS can be traced back to a NASA Small Business Innovation Research (SBIR) program that ran from 2000 through 2003, with many of the ideas coming from Hoh Aeronautics, Inc. The company realized the commercial potential of such an autopilot system, and began developing the product. It then signed an agreement with Cobham/Chelton in March 2006, with the latter providing funds to develop the certifiable hardware and to conduct the extensive testing required for a Federal Aviation Administration (FAA) supplemental type certificate (STC). HeliSAS received its first STC — for the Robinson R44 — in October 2009.
Due to liability concerns related to Robinson’s self-insured status, Cobham ultimately decided against offering the R44-based product. Instead, they teamed with Edwards & Associates to obtain an STC approval to install the HeliSAS on the Bell 206, 206L, and 407 series helicopters, and teamed with Metro Aviation for installation of the HeliSAS on the Eurocopter (now Airbus Helicopters) AS350 series aircraft.
I had my first opportunity to sample the HeliSAS in a Bell 206 back in 2010 — and I looked forward to trying it on the 407, for which certification work was ongoing. The intervening years have brought not only a change in manufacturer name (as part of a management buyout, Cobham sold the division that produces the HeliSAS in April 2014, and that division was renamed Genesys Aerosystems), but also a handful of new FAA STCs, including for the Airbus Helicopters EC130 B4 and H130, and the Robinson R44. Further afield, the company has secured European Aviation Safety Agency (EASA) approval for all its existing STCs except the R44 and H130. But, according to Jamie Luster, Genesys Aerosystems’ director of sales and marketing, these have been applied for and are expected soon.
Finally, it’s also pretty well known that Robinson is on the verge of certifying the HeliSAS on its R66, and will be offering the unit as a factory option on both the R44 and R66.
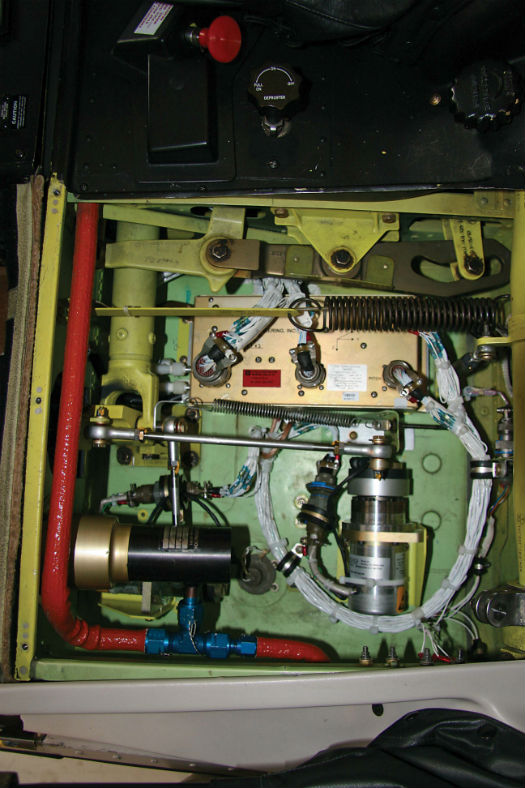
The pitch and roll servo actuators for the HeliSAS are mounted in parallel with the corresponding cyclic controls, all fitting nicely under the front left seat.
What’s in the box?
The HeliSAS system is actually quite simple in its makeup, consisting of a dual processor digital flight control computer (FCC), the HeliSAS control panel (HCP), and two servo-actuators — one each for pitch and roll. (In the Bell 407, these are neatly mounted under the left front seat.) Also, depending on the helicopter’s specific configuration, there will either be a HeliSAS attitude gyro that takes the place of the standard attitude gyro, or, if there is an attitude heading reference system (AHRS), that may be used to supply pitch and roll attitude to the FCC instead. For the legacy NAV (VOR, LOC, ILS) portions of the system to work, there must be either a mechanical horizontal situation indicator (HSI) installed, or an electronic flight display with HSI functions — such as the Garmin G500H in the HeliSAS-equipped Bell 407 I flew for this report.
The only parts of the physical HeliSAS system (other than attitude source) visible to the pilot are the HCP, and the cyclic force trim release (FTR) and autopilot disconnect (AP DISC) switches on the cyclic stick. The HCP is a very slim and clean panel for engaging the various functions of the HeliSAS, with associated indicator lights above each function button.
As diminutive as the HCP is, the HeliSAS it controls is just the opposite. In its most basic state, the HeliSAS is just what its name implies — a stability augmentation system (SAS). Simply turn it on, place the helicopter in a desired pitch and roll attitude (within set limits), reset the FTR, and the HeliSAS maintains that attitude.
Beyond that, the autopilot modes include heading command (HDG), NAV for VHF NAV (VOR/LOC/ILS), and a full menu of GPS-related features including navigation, procedure turns, holding patterns, and the full assortment of LNAV/VNAV approaches. These are also accessed through the NAV function on the HCP, so long as the appropriate GPS/VLOC selector is placed in GPS mode. Finally, the system will fly back course approaches.

The cyclic controls include the AP Disconnect, which is the top red button, and the Force Trim Release button just below it on the left side.
The autopilot has two pitch options besides basic SAS, and those are altitude hold (ALT), and the vertical mode (VRT). In VRT, the HeliSAS autopilot will fly an ILS glideslope or GPS VNAV, LNAV+V, OR LPV glidepaths. More on all of this shortly.
Ok, enough of the background — let’s go fly this thing.
Getting Airborne
My test platform for the HeliSAS was a beautiful Bell 407, lavishly equipped with a complement of Garmin avionics, including the GTN 750, GNS 430W, and G500H flight display. The helicopter’s owner, Bill VanAntwerp, was as unassuming, kind, and gracious as his 407 was gorgeous.
With the 407 at idle, the HeliSAS was already powered up into standby mode — as evidenced by the white indicator light above the SAS button on the HCP. The unit does not have its own on/off switch, as it’s wired directly to the avionics bus and is activated as soon as the master switch is turned on. This configuration allows the HeliSAS to be engaged immediately if needed by the pilot. If an AHRS is used, as was the case in our 407, the HeliSAS enters the standby mode after the alignment process is complete.
Ground checks for the system are quick and simple. The first is to engage the SAS, verify the green light is on, then slightly displace the cyclic — both pitch and roll — and note resistance. Then do the same with the FTR button depressed to confirm low resistance. Finally, pressing the AP DISC button places the HeliSAS into standby mode again, and there should be no resistance. I also heard four beeps in my headset while verifying that the SAS mode light went from green to white. These checks can be done in the amount of time it took you to read this paragraph. All was well and we were ready for takeoff.
I did the first takeoff with the system in standby with no SAS at all. It was a normal take-off from a runway, and as soon as I was at my desired speed and climb pitch, I engaged the SAS mode. The system immediately grabbed and held the climb attitude I had established. With the power set, the 407 just climbed normally in my preset attitude.

Although the HeliSAS doesn’t have auto hover capability, the author did find that the autopilot did an impressive job at maintaining hands-off stability in the hover.
I was anxious to test the “fly-through” forces and FTR. What I was pleasantly surprised to experience is that — unlike other helicopters I’ve flown with SAS — I experienced virtually no “bump” in the flight controls when I depressed the FTR, even with a considerable amount of force applied against the established preset attitude. Of more importance, there was no “bump” or “lurch” from the aircraft; the 407 remained rock steady regardless of how much fly-through force I released with the FTR.
I centered the heading bug on the G500H to our current heading, engaged the HDG mode of the autopilot, and the system seamlessly took over heading hold. Skewing the heading bug resulted with a prompt roll in the direction of the assigned heading and an equally smooth roll out, right on heading.
The next step was to test the altitude function. Normally, one would level the helicopter first at the desired altitude and then engage ALT. I wasn’t as accommodating. As we reached my desired cruise altitude, I engaged ALT on the HCP. The 407 climbed to about 50 feet above my engagement altitude, but then came back down to within 20 feet of my desired height — and it did so smoothly.
Next, I rolled the aircraft into about a 20 degree left bank turn against the SAS force and then released the stick. The system immediately and smoothly returned the 407 to its previously set level flight. I achieved the same results with an even steeper right hand bank.
Testing the limits
The STC for the system calls for a standard configuration of attitude limits: six degrees nose down pitch, 11 degrees nose up pitch, and +/- five degrees bank. If you engage the SAS while outside these limits, it will immediately return to them. Also, if the FTR is pressed and released outside these limits, the SAS will return the helicopter to within the applicable limit.
To test this, I first rolled the 407 to the right to about a 30-degree bank, and level pitch, with the FTR depressed. As soon as I released the FTR, the system rolled the 407 back to a five-degree bank in the same direction — exactly as designed. Next I rolled to the left 20 degrees while pitching the nose over to about 10 degrees down. Upon release of the FTR button, the system smoothly rolled the 407 back to five degrees left bank, while pitching up to six degrees nose down. (I have no shame in admitting that neither I, nor VanAntwerp, were comfortable in pitching the 407 up far enough above the 11 degree nose-up limit to see how well it would pitch the nose back to 11 degrees. Instead, I pitched up against the system set for level, then let go from about an eight-degree nose up attitude — and was not surprised that it smoothly returned us to level.)

The HeliSAS control panel as installed in the test ship. The owner added the larger labels for improved legibility since the HCP is mounted below his avionics stack.
Lowering the collective to near flat pitch simulating an autorotation entry (but without rolling off throttle), I wanted to see how the back force felt when slowing to the normal attitude for an auto. Although there was a considerable amount of back force required, two things were evident: the back force in no way restricted me from quickly assuming the proper attitude; and, in spite of the considerable back force, there was not a hint of control or airframe “bump” when I depressed the FTR. It was 100 percent smooth.
Recovering from the descent, I resumed normal straight and level flight and depressed the AP DISC to put the entire system into standby. The controls felt like a typical 407, with no resistance. I rolled the 407 into a 30-degree left bank with a five-degree pitch up, and then depressed the SAS button on the HCP. The system immediately rolled the 407 level, but it maintained the five-degree pitch up because it was less than the 11 degree configuration limit.
To begin testing the NAV functions, I selected a nearby VOR and switched the CDI selector from GPS mode to VLOC on the GTN 750. After dialing the course selector to the inbound course, I engaged the NAV button. In our case, our present heading for a roughly 30-degree intercept, and the fact that the autopilot predicted that we’d intercept the course in less than 15 seconds, meant that the NAV annunciator on the HCP immediately went to green — showing that the course had been captured by the autopilot.
However, had the predicted intercept time been greater than 15 seconds, the autopilot would assume a 45-degree intercept angle and the annunciator on the HCP would show white to indicate the NAV function was armed. Once the helicopter was within 15 seconds of the intercept, the annunciator would show green — indicating capture.
Loss of a VOR signal will result in disconnect of the NAV mode, leaving lateral control in SAS mode (it maintains a level roll attitude). If engaged, altitude hold would remain engaged. I tested this feature by selecting an invalid VOR frequency and the HeliSAS responded appropriately.

The test ship featured a full complement of Garmin avionics. The G500H flight display also serves as the AHRS source for the HeliSAS.
Making an Approach
With the VOR work complete, I moved to GPS functions. I had positioned us so that we were on the appropriate side of the airport to initiate an RNAV (GPS) LPV approach. I loaded and activated the approach, with the first fix being the initial approach fix (IAF), then switched the VLOC/GPS selector on the GTN 750 to GPS. I verified the annunciator on the HCP was green, and the 407 immediately turned towards the IAF.
The full procedure called for one turn in the hold before proceeding inbound. As we approached the IAF, I reduced power by 30 percent to go from cruise power to holding power. The ALT function was engaged, and there was a drop of about 60 feet with the power reduction. The autopilot quickly returned us to our proper altitude, and then dutifully entered and flew the hold, continuing inbound to the final approach fix.
At that point, while still in ALT mode, I armed the VRT mode, which was confirmed by the annunciator showing white over the VRT button. Once the HeliSAS captured the glideslope (vertical guidance for the LPV approach), the VRT annunciator switched to green, and the 407 pitched to descend. All I had to do was reduce collective to the proper torque to maintain the desired speed for the approach, just prior to capture. The HeliSAS flew the course and glideslope like it was on rails.
I wanted to do the full missed approach procedure so upon reaching decision altitude, I engaged the ALT mode to stop our descent. This immediately disarmed the VRT mode. At the MAP, I disarmed the ALT mode, established pitch and power for the climb, and released the SUSP (suspend) on the GTN 750. The autopilot immediately and properly began flying the missed approach procedure, which was to go to a waypoint and hold. Too easy.

Here the HCP is shown with the green lights indicating that the SAS is operational and the NAV and ALT (altitude) functions of the autopilot are engaged.
We then proceeded back to the airport to finish up with a little bit of pattern work in SAS mode. Turning a base leg from downwind, I didn’t use the FTR; when it was time to level out, I just released the pressure on the cyclic. The 407 smoothly rolled out to a level base leg attitude.
After a normal approach to a hover, I eased off of the cyclic to see what the SAS would do. Although not an auto hover by any means, the SAS impressively worked hard to keep the ship stable in the hover. The thought came to mind at how great this would be for someone in the rare situation of being up front with an incapacitated pilot.
To complete my test card, I flew a steep approach to a hover, did some HeliSAS-assisted rock steady sideward flying, then finished with a quick stop. What was neat about the quick stop was the SAS was centered at nose level, so when I flared, I just pulled against the stick pressure and didn’t use the FTR. When it was time to lower the nose, I just released the back pressure and the SAS smoothly returned the nose to level for the descent to touch down.
Final Thoughts
Trying to be respectful of the helicopter time and cost, I told VanAntwerp that I was finished with my routine. He asked if I had time for lunch and when I responded “yes,” he instructed me to take off and head southwest. He loaded the coordinates for a favorite fly-to lunch spot and said, “I’m having too much fun watching you fly this thing, and I’m not ready to quit!” So off to lunch we went.

Bell 407 owner VanAntwerp indicated that after having the HeliSAS installed, he’d never consider owning another helicopter without one.
The bonus flight allowed me to sample the HeliSAS for an extended period of time flying in cross-country mode. It did an exceptional job. In fact, I remarked to VanAntwerp that the HeliSAS flew this 407 either as well, or at times, even better than the full automatic flight control system (AFCS) installed in the EC135 I flew in my former helicopter emergency medical services (HEMS) role. For example, the AFCS would only fly the glide path for a traditional ILS approach — it was not capable of flying the glide path for any GPS approaches. This HeliSAS did. But, even without the approaches, my thoughts go to all the Bell 206s, 206Ls, and 407s crisscrossing the skies flying HEMS, offshore, corporate and the like — how wonderful it would be to have HeliSAS to not only reduce the pilots’ workload and increase situational awareness, but to help them deal with an inadvertent entry into instrument meteorological conditions.
In my recent report on the Bell 407GX (see p.92, Vertical, June/July 2015), I got on my soap box about the absurdity of today’s technologically advanced single-engine helicopters not being approved for instrument flight rules (IFR). The capability of the HeliSAS just drove that home for me.
Single-engine fixed-wing aircraft, from the turbine Pilatus PC-12s and Daher-Socata TBM 700/800/900 series airplanes, to the numerous piston engine ships out there, are plowing through the clouds for hire on IFR flight plans. So is going IFR in ships like the 407 with glass panels and HeliSAS just a dream? Hopefully not. When I asked Luster about the possibility of the HeliSAS being a part of a helicopter IFR platform, she said Genesys Aerosystems was looking for a partner to accomplish such an endeavor.
Regardless, the approximate installed cost of US$120,000 for the benefit of the safety and utility the HeliSAS brings to helicopters like the Bell 407 would seem to make installation an easy decision. Indeed, many operators are now including the HeliSAS as part of their completion packages. The HEMS sector is one such industry group leading that charge.
“I had never thought of buying an autopilot for a helicopter,” said VanAntwerp. “But now that I have it, I wouldn’t have a helicopter without a HeliSAS.” It would appear that the right time for the HeliSAS has finally come.