

Its virtually impossible to maintain heading accurately while hovering in some wind conditions, for reasons that arent the pilots fault. Mike Reyno Photo





Many pilots have a deeply held belief that if they cant make a helicopter fly accurately, it is somehow their fault. Thats understandable: pilots are indoctrinated into this mindset from the time they start learning how to fly. However, in many instances its actually not the pilots fault.
The following article will explain why pilots are not to blame for one at least common problem maintaining heading in certain wind conditions.
The Source of the Problem
One of the major challenges in teaching experienced helicopter pilots how to become research and development or experimental helicopter pilots is getting them to acknowledge that they have enough experience to be able to make a machine do what they want. In other words, if there is a problem in performing a certain maneuver, the problem most likely lies with the machine, not the pilot.
The goal of testing is to try to find the cause of the problem, and for that purpose R&D pilots are equipped with a series of engineering tests. The engineering tests themselves wont tell you what the problem is, but theyre useful when youre trying to determine why that problem exists.
With that background in mind, for this article were going to examine a late-1970s study/report from the Royal Australian Air Force (RAAF) on the Bell 206B-1 (which was equipped with a smaller tail rotor than the one on current JetRanger models). Now, to be fair, the Bell 206 is one of my favorite helicopters in many ways, and the problem discussed here happens to be an old, minor problem area that has since been reduced. However, the RAAF report illuminates a common control problem that many experienced 206 pilots recognize (and compensate for very well), but may not fully understand.
Following an incident with one of its crews, the RAAF decided to investigate the low-speed envelope of the Bell 206B-1 (i.e., its performance in less than 40 knots of wind from any direction). The first step in this process was to develop a test plan to determine what exactly needed to be measured, and how to do the tests safely and effectively.
Following that, an airframe was carefully instrumented with sensors to show cockpit control positions, as well as pitch and roll attitudes. The purpose of the sensors was to measure how much the controls were being moved, and to make it possible to identify any case in which there was not enough control capability to maintain a desired position (such as a heading). Its important to note that the sensors indicated not just how much the controls were being moved, but also how much the controls really needed to be moved. (If youve ever flown with someone who makes a lot of needless control inputs to continually reassure themselves that the cockpit controls are still connected to the rotor blades, youll know what I mean by this key distinction!)
A pace vehicle was obtained that had a way to measure speed across the ground accurately. By flying in no-wind conditions, and maintaining position on the pace vehicle with specific relative headings, it was possible to look at the aerodynamics and their effect on control activity.
The process was similar to the testing that is done during certification (my non-pilot brother sat through one of these tests as a passenger and called it runway waltzing. One manufacturer calls it RUDR: running up and down the runway). However, certification testing which is done at maximum weight and with the worst allowable center-of-gravity condition is also repeated out-of-ground-effect, whereas the testing in this case was done in-ground-effect only.
To supplement the sensor data, a qualitative assessment of the ease or difficulty of maintaining a heading accurately was made using a wonderful and much misunderstood rating system called the Cooper-Harper rating scale (see Figure 1). Having taught test pilots and engineers how to use this scale to fill in the missing parts that engineering tests dont cover, I can attest that in the right hands and with suitable training, it is a powerful tool.
The no-wind condition is one of the things about this type of testing that is artificial and difficult to relate to the real world. Unfortunately, we cant command the weather, so the only way to gather the data necessary is to fly in no-wind (or very, very light wind) conditions, and then generate the relative wind on the airframe by moving across the ground. The real world, of course, presents us with a different situation winds of more than about seven to eight knots are always variable in both direction and magnitude, but I know of no other way to do these tests accurately. Just hovering with wind speeds reported by air traffic control or some other agency doesnt cut the mustard, as their measuring devices are typically not alongside the helicopter. So, until we get good low-airspeed-indicating systems on helicopters, were pretty much stuck with this situation.
But, back to the testing.
Intriguing Results
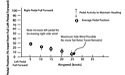
Its pretty widely accepted that for North American-built helicopters (i.e., those with main rotors that turn counter-clockwise when viewed from above), the situation that is going to generate the worst condition from the standpoint of margin of control remaining is a wind from the right at about 15 to 18 miles an hour. Indeed, the RAAFs testing showed this to be the case (see Figure 2). Figure 3 shows this more clearly for a different helicopter and a higher wind speed.
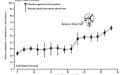
However, by looking at just the tail rotor control position and activity in trying to maintain a heading, an interesting phenomenon appears in other wind conditions. Notice in Figure 4, which shows a relative wind from 240 degrees, how there are two pieces of information: the average pedal position (the dot) and the control activity (the bar).
Now, also notice how the average pedal position doesnt change much as the wind speed increases from the same direction. What does this mean and how does this affect the pilot?
If we look at a condition where maintaining heading is relatively easy, we can see how the helicopter behaves (see Figure 4 at speeds of 0 to 10 knots). With a wind of up to 10 knots, the pilot has little difficulty holding heading with a relatively steady pedal position. An increase in wind speed from the left requires more right pedal to maintain heading. If the wind increases in speed from five to 10 knots from the same direction, the helicopter will start to yaw into the wind. The pilot adds some right pedal to stop the yaw and return the helicopter to the original heading. The amount of additional right pedal needed for winds up to about 10 knots is clearly shown and very little dancing on the pedals is needed.
But this testing also shows us an interesting issue for other wind strengths and directions, particularly with a wind that is coming from the front rear quadrant.
Still viewing Figure 4, look at a wind of more than 12 knots from the left rear, relative 240 degrees to the nose. Assume that its a steady wind, and that the pilot can initially stabilize on a constant heading and not have to move the pedals (note the word assume). Now the wind increases from 12 to 15 knots. The natural tendency of the helicopter is to want to yaw into the wind, and because the pilot doesnt have extrasensory perception and cant know that the change in wind speed is coming, the helicopter will yaw to the left.
Once the pilot senses this movement, he or she will apply some right pedal to stop the yawing, and a bit more pedal to bring the helicopter back to the original heading. But how much pedal should he or she add? Note that the average pedal position for 15 knots is nearly the same as for 10 knots, so whatever pedal was added was too much. That means the helicopter yaws to the right, but doesnt stop at the original heading, leading the pilot to add some left pedal to stop the new yawing, which ends up being too much left pedal to hold the helicopter steady; and on and on it goes.
Now the relationship between average pedal position and control activity becomes clear. Although there is not much change in the average pedal position from one wind speed to another, the control activity itself is high.
The qualitative evaluation of the ease or difficulty of holding heading revealed the same thing. The Cooper Harper rating given for the left-quartering tailwind from 10 to 30 knots was a seven. In plain English, this means that the task (maintaining heading accurately within five degrees) could not be accomplished. Indeed, it was not possible to maintain heading to even a lesser accuracy of plus-or-minus 10 degrees.
The reasons for why this happens are many and complex and really need not bother us in this article we can do nothing about them, and we need to learn to live with this situation. Note, however, that one reason why even a small, inexpensive automatic flight control system (AFCS) works very well for maintaining heading is because the AFCS can pick up on rates and accelerations long before us humans can, and can make small corrections very quickly.
So What?
The lesson here is that you shouldnt expect to be able to hover accurately in left-quartering tailwind conditions with a Bell 206 or most other North American-type helicopters (or in a right-quartering tailwind in helicopters with the other direction of main rotor rotation). Change your relative wind (a good idea for avoiding a potential loss of tail rotor effectiveness anyway), or accept the reduced accuracy. Certainly dont try to be super accurate in these conditions youll only get frustrated!
Shawn Coyle began helicopter life in the Canadian Air Force, and was fortunate enough to attend Empire Test Pilot School. This started a non-stop flight testing career, including teaching at three test pilot schools and working for Transport Canada as an engineering test pilot. Shawn is currently developing helicopter simulators and teaching seminars on helicopter flying.